
¿Qué es un accionamiento de velocidad variable?
Para comprender la respuesta a esta pregunta, es necesario
entender que la función básica de un accionamiento de
velocidad variable (VSD por sus siglas en inglés) es controlar el flujo de energía de la
red al proceso.La energía se suministra al proceso mediante el eje del motor.
Dos cantidades físicas describen el estado del eje: el par y la
velocidad. Por tanto, para controlar el flujo de energía debemos
controlar estas cantidades.
En la práctica, se controla cualquiera de las dos y se habla de
“control del par” o “control de la velocidad”. Cuando el VSD
funciona en el modo de control del par, la velocidad se determina
por la carga. Del mismo modo, cuando funciona en el modo de
control de la velocidad, el par también se determina por la carga.
En un principio, los motores de CC se utilizaban como VSD
porque alcanzaban con facilidad la velocidad y el par requeridos
sin necesidad de emplear mecanismos electrónicos sofisticados.
No obstante, la evolución de la tecnología del accionamiento de
CA de velocidad variable se ha visto impulsada, en parte, por el
deseo de emular el excelente rendimiento del motor de CC como,
por ejemplo, su rápida respuesta del par y su precisión en la
velocidad, pero utilizando motores CA resistentes y económicos
que no requieran ningún mantenimiento.
Accionamientos de motor CC
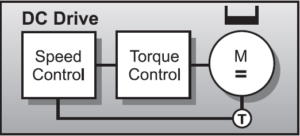
Figura 1: Bucle de control de un accionamiento de motor de CC
Características
• Orientación de campo mediante conmutador mecánico
• Las variables de control son la corriente del inducido y la
intensidad de campo, medidas DIRECTAMENTE desde el
motor
• El control del par es directo
En un motor de CC, la corriente crea el campo magnético
mediante las bobinas inductoras del estator. Este campo
siempre forma un ángulo recto con el campo creado por el
bobinado del inducido. Esta situación, denominada orientación
de campo, es necesaria para generar el par máximo. El grupo
de escobillas del conmutador garantiza esta situación,
cualquiera que sea la posición del rotor.
Una vez se consigue la orientación de campo, el par del motor
de CC se controla con facilidad variando la corriente del inducido
y manteniendo constante la corriente de magnetización.
La ventaja de los accionamientos de CC es que la velocidad y
el par – las dos preocupaciones principales del usuario final –
se controlan directamente mediante la corriente del inducido:
es decir, el par es el bucle de control interior y la velocidad es
el bucle de control exterior (véase la Figura 1).
Ventajas
• Control rápido y preciso del par
• Respuesta altamente dinámica de la velocidad
• Fácil de controlar
En un principio, los accionamientos de CC se utilizaban para
controlar la velocidad variable porque alcanzaban con facilidad
un par y una velocidad buenos de alta precisión.
Una máquina de CC puede producir un par que sea:
• Directo – el par del motor es proporcional a la corriente del
inducido: por tanto, el par puede controlarse de forma directa
y precisa.
• Rápido – el control del par es rápido; el sistema de
accionamiento puede tener una respuesta muy dinámica de
la velocidad. El par puede cambiarse de forma instantánea
si el motor se alimenta de una fuente de corriente ideal. Un
accionamiento con alimentación de tensión tiene una
respuesta rápida, ya que ésta se determina sólo por la
constante de tiempo eléctrico del rotor (es decir, la inductancia
y resistencia total del circuito del inducido).
• Simple – la orientación de campo se obtiene mediante un
dispositivo mécanico simple denominado grupo de escobillas
del conmutador. De esto modo, no es necesario utilizar un
complejo conjunto de circuitos de control electrónico que
incrementaría el coste del regulador del motor.
Inconvenientes
• Menor fiabilidad del motor
• Mantenimiento regular
• Alto precio de compra del motor
• Necesidad de un codificador para la realimentación
El principal inconveniente de esta técnica es la menor fiabilidad
del motor de CC; el desgaste de las escobillas y de los
conmutadores que requieren un mantenimiento regular; el alto
precio de compra del motor de CC, y la necesidad de utilizar
codificadores para la realimentación de la velocidad y la
posición.
Mientras que un accionamiento de CC produce un par fácil de
controlar desde cero hasta la velocidad de base y superior, la
mecánica del motor es más compleja y requiere un
mantenimiento regular.
Accionamientos de CA – Introducción
• Tamaño reducido
• Robusto
• Diseño simple
• Ligero y compacto
• Bajo mantenimiento
• Bajo coste
La evolución de la tecnología del accionamiento de CA de
velocidad variable se ha visto impulsada, en parte, por el deseo
de emular el rendimiento del accionamiento de CC como, por
ejemplo, su respuesta rápida del par y su precisión de la velocidad,
pero utilizando al mismo tiempo las ventajas que ofrece el motor
de CA estándar.
Accionamientos de CA – control de frecuencia con PWM
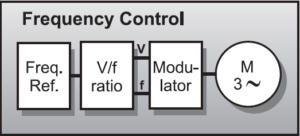
Figura 2: Bucle de control de un accionamiento de CA con control de frecuencia mediante PWM
Características• Las variables de control son la tensión y la frecuencia
• Simulación de la onda sinusoidal variable de CA mediante
un modulador
• Flujo proporcionado con un coeficiente constante de V/f
• Accionamiento de bucle abierto
• La carga determina el grado del par
A diferencia del accionamiento de CC, la técnica de control de
la frecuencia del accionamiento de CA utiliza como variables
de control parámetros generados fuera del motor,
concretamente la tensión y la frecuencia.
Las referencias de la tensión y de la frecuencia se introducen
en un modulador que simula una onda sinusoidal de CA que
alimenta el bobinado del estator del motor. Esta técnica se
denomina Modulación por Anchura de Impulsos (PWM) y se
basa en el hecho de que existe un rectificador de diodos hacia
la red y de que la tensión de CC intermedia permanece
constante. El inversor controla el motor a modo de un tren de
ondas PWM que establece la tensión y la frecuencia.
Cabe destacar que este método no utiliza un dispositivo de
retroalimentación que toma las medidas de velocidad o posición
del eje del motor y que las introduce en el bucle de control.
Este sistema, sin dispositivo de retroalimentación, se denomina
«accionamiento de bucle abierto».
Ventajas
• Bajo coste
• No requiere un dispositivo de retroalimentación – simple
Dado que no existe un dispositivo de retroalimentación, el
principio de control ofrece una solución simple de bajo coste
para controlar los motores económicos de inducción de CA.
Este tipo de accionamiento es apto para aplicaciones que no
requieren una alta precisión, tales como bombas o ventiladores.
Inconvenientes
• No se utiliza la orientación de campo
• Se ignora el estado del motor
• No se controla el par
• Se utiliza un modulador retardatorio
Con esta técnica, a veces denominada Control Escalar, no se
utiliza la orientación de campo del motor. En lugar de ello, la
frecuencia y la tensión son las variables de control principales
y se aplican al bobinado del estator. El estado del rotor se
ignora, es decir, no se retroalimenta la señal de velocidad ni
de posición.
Por tanto, el par no puede controlarse con precisión. Además,
la técnica utiliza un modulador que, básicamente, ralentiza la
comunicación entre las señales de entrada de tensión y
frecuencia y la necesidad del motor de responder a esta señal
cambiante.
Accionamientos de CA – control de vector de flujo mediante PWM
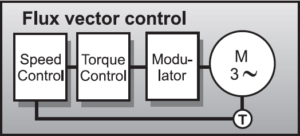
Figura 3: Bucle de control de un accionamiento de CA con control del vector de flujo mediante la PWM
Características• Control orientado de campo – simula el accionamiento de
CC
• Se simulan las características del motor eléctrico
– “Modelo de Motor”
• Accionamiento de bucle cerrado
• El par se controla INDIRECTAMENTE
Para emular las condiciones magnéticas de funcionamiento
de un motor CC, es decir, para realizar el proceso de orientación
de campo, el accionamiento de vector de flujo necesita conocer
la posición espacial angular del flujo del rotor en el interior del
motor de inducción de CA.
Con accionamientos de PWM de vector de flujo, la orientación
de campo se obtiene por medios electrónicos en lugar de utilizar
el grupo mecánico de escobillas del conmutador del motor
CC.
En primer lugar, la información sobre el estado del rotor se
obtiene retroalimentando, mediante un codificador de impulsos,
la velocidad del rotor y la posición angular referentes al campo
del estator. Un accionamiento que utilice codificadores de
velocidad se denomina «accionamiento de bucle cerrado”.
Además, las características eléctricas del motor se modelan
matemáticamente con microprocesadores utilizados para
procesar los datos.
El regulador electrónico de un accionamiento de vector de flujo
crea cantidades eléctricas, tales como la tensión, la corriente
y la frecuencia, que son las variables de control, y las alimenta,
mediante un modulador, al motor de inducción de CA. Por tanto,
el par se controla INDIRECTAMENTE.
Ventajas
• Buena respuesta del par
• Control preciso de la velocidad
• Todo el par a velocidad cero
• Rendimiento parecido al del accionamiento de CC
El control de vector de flujo alcanza todo el par a velocidad
cero, con lo cual ofrece un rendimiento muy parecido al del
accionamiento de CC.
Inconvenientes
• Se requiere retroalimentación
• Coste elevado
• Se requiere modulador
Para obtener un alto nivel de respuesta del par y de precisión
de la velocidad, se requiere un dispositivo de retroalimentación.
Esto puede resultar costoso y, además, complica el tradicional
motor simple de inducción de CA.
Asimismo, se utiliza un modulador que ralentiza la
comunicación entre las señales de entrada de tensión y
frecuencia y la necesidad del motor de responder a esta señal
cambiante.
A pesar de que el motor es simple desde el punto de vista
mecánico, el accionamiento es complejo desde el punto de
vista eléctrico.
Accionamientos de CA – Control Directo del Par
Figura 4: Bucle de control de un accionamiento de CA con DTC
Variables de control
Con la tecnología revolucionaria de DTC desarrollada por ABB,
la orientación de campo se obtiene sin retroalimentación
utilizando teorías avanzadas del motor para calcular
directamente el par del motor sin utilizar la modulación. Las
variables de control son el flujo magnetizante y el par del
motor.
Con el DTC no hay modulador y no se requiere un tacómetro o
un codificador de posición para retroalimentar la velocidad o la
posición del eje del motor.
El DTC utiliza el hardware más rápido de señales digitales
disponible y un concepto matemático del funcionamiento del
motor más avanzado.
El resultado es un accionamiento con una respuesta de par 10
veces más rápida que la de cualquier accionamiento de CA o
CC. La precisión dinámica de la velocidad de los accionamientos
DTC será 8 veces superior a la de cualquier accionamiento de
CA de bucle abierto y comparable a un accionamiento de CC
que utilice retroalimentación.
El DTC produce el primer accionamiento “universal” con
capacidad para funcionar bien como un accionamiento de CA
o como uno de CC.
El resto de secciones de esta guía destacan las características
y ventajas del DTC.
Comparación de accionamientos de velocidad variable
Analicemos con más detenimiento cada uno de estos bloques
de control para detectar algunas diferencias.
Figura 1: Bucle de control de un accionamiento de CC
Figura 2: Bucle de control con control de frecuencia
Figura 3: Bucle de control con control de vector de flujo
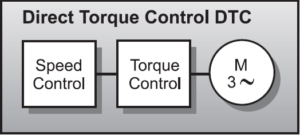
Figura 4: Bucle de control de un accionamiento de CA con DTC
La primera observación es la similitud entre el bloque de control
del accionamiento de CC (Figura 1) y el CDT (Figura 4).
Ambos utilizan parámetros del motor para control el par
directamente.
Pero el DTC tiene más ventajas, tales como: el hecho de no
utilizar un dispositivo de retroalimentación; todas las ventajas
de un motor CA (véase página 8); y el hecho de no necesitar
excitación externa.
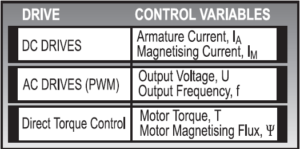
Tabla 1: Comparación de las variables de control
Como puede comprobarse en la Tabla 1, tanto el accionamiento
de CC como el DTC utilizan parámetros reales del motor para
controlar el par y la velocidad. Por tanto, el rendimiento dinámico
es fácil y rápido. Además, con el DTC, no se necesita, para la
mayoría de las aplicaciones, un tacómetro o codificador para
retroalimentar una señal de velocidad o posición.
Si se compara el DTC (Figura 4) con los otros dos bloques de
control de accionamiento de CA (Figuras 2 & 3) se observan
varias diferencias, siendo la principal que, con el DTC, no se
requiere un modulador.
Con los accionamientos de PWM de CA, las variables de
control son la frecuencia y la tensión, las cuales necesitan
atravesar varias fases antes de aplicarse al motor. Por tanto,
con los accionamientos de PWM, el control se realiza dentro
del regulador electrónico y no dentro del motor.


Sobre el autor